Satellite
La charge utile Lidar fournie par l’Allemagne sera montée sur une plateforme Myriade Évolutions française pour petits satellites. La série de satellites Myriade a été lancée en 1998. Elle a exécuté un grand nombre d'objectifs de missions et offert aux scientifiques un outil polyvalent d’essai d’instruments d’un poids approximatif de 60 kg pour une puissance de 60 W. La ligne de produit Myriade Évolutions a été conçue pour de courtes missions en orbite, à budgets réduits et suivant une phase de développement à durée optimisée.
Le programme Myriade Évolutions est une amélioration du concept d’origine, avec une augmentation de la puissance allouée (environ 150 W) et du poids (environ 140 kg) de la charge utile. Les principales améliorations reposent sur une nouvelle structure compatible d'un satellite d’une masse de 400 kg environ ; un accroissement de la capacité des panneaux solaires et une augmentation de l’énergie disponible ; un nouveau système de propulsion plus performant ; un système de contrôle d’attitude et d’orbite (SCAO) amélioré ; une augmentation de la capacité de stockage des données de la charge utile ; une amélioration du bilan de fiabilité ; une prise en compte de l’obsolescence et enfin une compatibilité avec les orbites basses (traitement des problèmes d’oxygène atomique).

Plateforme Merlin basée sur Myriade Evolutions
L’illustration ci-dessus présente un agencement de la plateforme Merlin. Le réservoir est placé au centre du plancher inférieur, les quatre propulseurs étant situés sous ce même panneau. Deux antennes en bande S et deux antennes GNSS sont visibles sur la partie extérieure des panneaux latéraux. Les trois magnéto-coupleurs peuvent être montés à l’intérieur ou à l’extérieur de la plate-forme. Les équipements suivants sont montés à l’intérieur de la plateforme : un système de contrôle et de distribution de l'énergie, une batterie, un calculateur central et son interface, une mémoire de masse, quatre roues à réaction, deux magnétomètres, deux émetteurs-récepteurs en bande S, un émetteur en bande X, deux récepteurs GNSS et un senseur stellaire.

Satellite Merlin
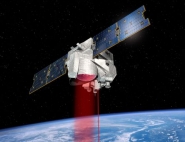
L’illustration précédente présente l’aspect général du satellite Merlin. Le satellite est présenté dans sa configuration opérationnelle avec les panneaux solaires déployés. La charge utile Lidar est montée sur le panneau "supérieur" de la plateforme.
Certains équipements de la plateforme sont disposés à proximité de l’instrument : deux têtes optiques de senseurs stellaires et leur déflecteur, deux panneaux solaires, une antenne bande X et un senseur solaire destiné notamment aux évitements solaires.
Vue d'Artiste du satellite Merlin en orbite
© CNES/Illustration D. Ducros
L'intégration du satellite est prévue dans les locaux d'Airbus Defence and Space France à Toulouse, commençant par les activités sur la plateforme. Ensuite viendra l'installation de la charge utile sur le panneau "supérieur" de la plateforme, après livraison de la charge utile par l'Allemagne à la France.
Les principaux organes du Lidar Merlin sont le boîtier de commande de l’instrument (a), un système laser (b), un coffret de référence de fréquence (c), un coffret d’étalonnage d’énergie (d), une chaîne de détection (e), un télescope de réception (f) et un télescope d'émission (g).
Merlin sera le premier système Lidar IPDA en orbite. Pour des questions d'optimisation de coûts de développement et de qualification, il n’est pas envisageable que l'instrument repose sur des technologies novatrices qui n'auraient pas fait l'objet, d'ores et déjà, d'une qualification spatiale.
Le choix des sous-systèmes doit également prendre en compte :
- La consommation énergétique : limitée par les capacités de la plateforme Myriade Évolutions,
- La masse et le volume : limités en raison des contraintes imposées par la plateforme et le lanceur,
- Le comportement thermique : le système doit être régulé thermiquement avec une grande précision et ce, malgré les conditions sévères rencontrées en orbite,
- Résistance aux rayonnements : le système doit fonctionner dans les conditions spatiales et aucune dégradation due aux rayonnements n’est acceptable.
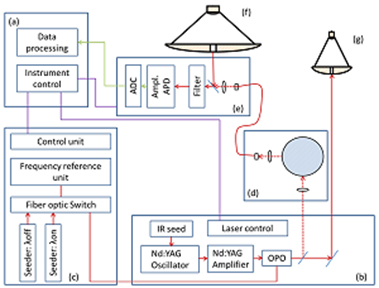
Configuration de base de l'instrument
(a) boîtier de commande de l’instrument (ICU), (b) laser, (c) coffret de référence de fréquence, (d) coffret d’étalonnage d’énergie, (e) récepteur, (f) télescope récepteur, (g) système optique d’émetteur
Le boîtier de commande de l’instrument (ICU) est le principal élément de contrôle. Il permet la synchronisation interne de l’instrument, génère les tensions de commande et de polarisation nécessaires et lit les données de servitude. L’autre partie de l’ICU est constituée du système de lecture ADC à haut débit.
Le choix d’une longueur d’onde laser adaptée à un instrument IPDA dépend principalement des facteurs suivants : bandes d’absorption du méthane, efficacité des détecteurs et sécurité oculaire. Dans l’infrarouge à ondes courtes où la sécurité oculaire est moins critique, les raies de méthane sont abondantes, mais la présence de raies de vapeur d’eau et de dioxyde de carbone limite considérablement les choix.
Deux fenêtres de transmission de vapeur d’eau atmosphérique autour de 1,6 et 2,3 µm permettent d’effectuer des mesures de méthane. Les performances des détecteurs sont sensiblement meilleures dans la région de 1,6 µm où des photodiodes à avalanche InGaAs à faible bruit sont disponibles.
En outre, l’intérêt scientifique présenté par les mesures de méthane est centré sur le taux de mélange du volume de méthane troposphérique. Un système Lidar spatial doit être petit, léger, fiable et très efficace tout en consommant peu de puissance. Le laser utilisé dans le cadre de la mission Merlin n’est pas un développement entièrement nouveau puisqu’il découle de travaux exécutés pour le modèle électrique et de qualification du laser FULAS (FUture LAser System) de l’ESA (European Space Agency). Par conséquent, la mission Merlin bénéficie pleinement de l’héritage FULAS.
Les paramètres laser sont répertoriés dans le tableau ci-dessous :
| Énergie des impulsions de sortie | Fréquence de répétition des impulsions (pour les impulsions doubles) | ||
| nm | nm | mJ | Hz |
| 1645.552 | 1645.846 | 9 | 20 |
Le sous-système de référence de fréquence du méthane (MFRU) est destiné à générer des signaux laser aux deux fréquences en ligne et hors ligne afin d’être injectés dans chaque oscillateur paramétrique optique (OPO) impulsé. La stabilité du laser et la connaissance de la fréquence du signal de sortie ont une grande influence sur la qualité de la mesure. Elles constituent également les principaux paramètres de l’erreur systématique relative, raison pour laquelle cet équipement doit être conçu avec le plus grand soin. La conception actuelle repose sur un lambdamètre utilisant un étalon Fizeau. Le lambdamètre sera étalonné périodiquement selon une longueur d’onde absolue utilisant une diode de référence dont la longueur d’onde est bloquée à travers une cellule à gaz de méthane et la boucle de contrôle associée.
Le Lidar IPDA de Merlin est un système de mesure de distance qui repose uniquement sur la mesure relative d’intensités de signaux. L’intensité du signal de retour enregistré est une fonction directe de l’énergie de l’impulsion émise. Même les lasers de très bonne qualité présentent une variation d'environ 2 à 4 %. Il est donc nécessaire de surveiller attentivement l’énergie de chaque impulsion laser émise et de la corréler avec l’intensité des signaux reçus. Ceci permet de compenser les variations d’énergie des impulsions sur toute la plage de mesure IPDA, impulsion par impulsion.
Afin de générer ces signaux d’étalonnage internes, une petite fraction des impulsions laser émises est extraite et injectée directement dans le détecteur de l’instrument, qui enregistre également le signal depuis la cible. L’utilisation du même détecteur pour mesurer les signaux de retour et d’étalonnage garantit l’absence de différences dans le traitement du signal, ce qui permet de comparer directement les deux signaux.
La difficulté réside aussi dans la faible puissance du signal de retour qui impose d’atténuer le signal de référence selon un facteur significatif. Cette atténuation doit être stable pendant toute la durée du fonctionnement de telle sorte que le signal demeure dans la même plage.
La conception de référence actuelle du boîtier d’étalonnage d’énergie utilise une sphère intégrante et des fibres optiques destinées à atténuer, voire éliminer les points chauds locaux.
Les systèmes optiques de l’émetteur sont destinés à adapter la divergence angulaire naturelle du faisceau laser de manière à ce que le point éclairé au sol présente le diamètre requis. Le point au sol doit être suffisamment grand pour être cohérent avec le bilan d’erreur total quand on tient compte de l’effet des corrélations entre la réflectance hétérogène superficielle et le dépointage potentiel du laser dans les deux longueurs d'ondes. D’autre part, il doit être suffisamment petit pour limiter les variations de hauteur de la surface à l'intérieur de l’empreinte au sol.
Le champ du télescope de réception doit être aussi grand que possible. La conception actuelle du miroir principal est une structure de 0,69 m de diamètre configurée en télescope afocal Cassegrain-Mersenne.
Le choix du matériau influence non seulement le poids, mais également le comportement thermique, paramètre critique dans les applications spatiales. La taille de la plateforme du satellite est une autre difficulté rencontrée lors de la conception du télescope de réception.
Elle limite déjà le diamètre, tandis que la coiffe du lanceur ajoute des contraintes de hauteur. Malgré cela, le champ de vue doit être suffisamment grand pour contenir l’ensemble de l'empreinte au sol du laser (incluant une marge pour le dépointage du satellite et du laser).
Enfin, la taille du détecteur constitue un autre facteur de limitation de la conception du télescope. Avec des photodiodes à avalanche, le bruit augmente considérablement avec le champ du détecteur, ce qui limite le choix à un détecteur présentant un petit champ actif.
En raison de la limitation d’énergie de l’impulsion laser et de la taille du télescope de réception, le bruit généré par les circuits électroniques du récepteur et le détecteur est critique quand on tente de satisfaire les exigences de précision des mesures.
Par conséquent, on porte une attention particulière au choix du détecteur. Le détecteur et les autres étages d’amplification doivent générer aussi peu de bruit que possible.
Dans la région des 1,65 µm, les photodiodes à avalanche InGaAs semblent être les candidats les plus prometteurs. Elles peuvent fonctionner indifféremment dans le mode linéaire ou Geiger. On utilise le mode Geiger pour détecter les photons isolés. Ceci est considéré comme une alternative intéressante au mode linéaire, mais l’exploitation dans le mode Geiger n’a pas été retenue pour MERLIN en raison de l’inévitable temps d’arrêt des PDA après la détection d’un photon, qui peut être de l’ordre d’une microseconde. Une impulsion laser MERLIN durera moins de 30 ns. Par conséquent, un photon par impulsion laser au maximum pourrait être détecté. Les détecteurs au mercatel (Mercury Cadmium Telluride) (MCT) présentent également un intérêt. Ils possèdent quelques qualités intéressantes de détection par faible luminosité autour de 1,65 µm grâce à leur faible bruit excessif. Malheureusement, ils ne sont pas encore disponibles dans le commerce et il n’est donc pas possible de les envisager dans la conception de référence de MERLIN.

Charge utile Merlin